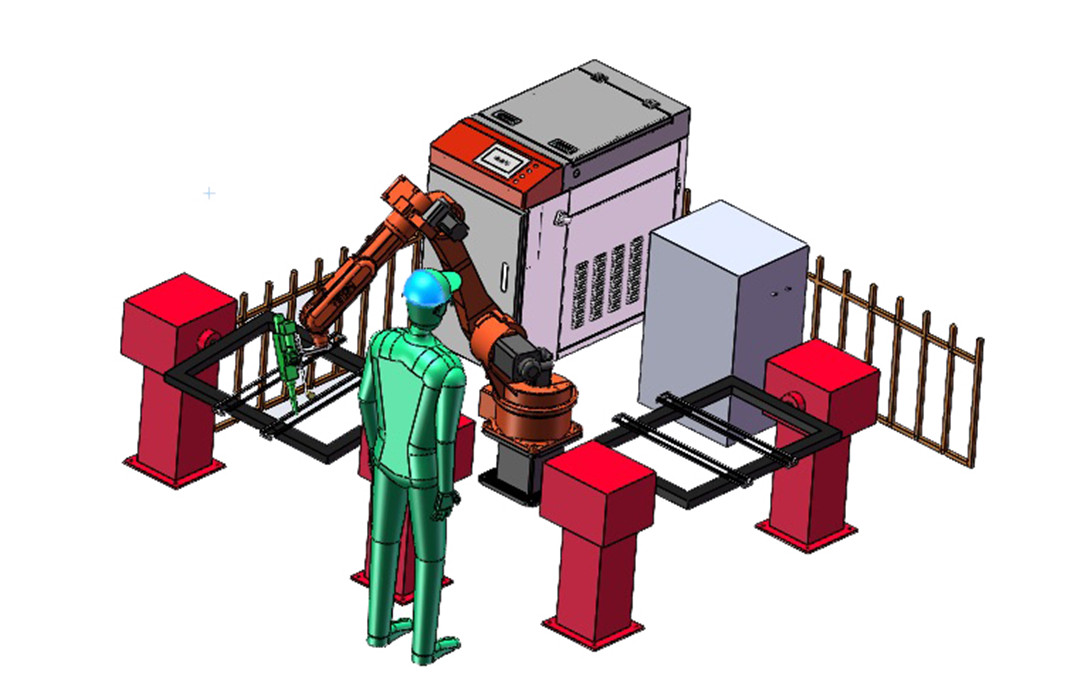
Robot süýümli lazer kebşirleýji maşyn

Enjamyň aýratynlyklary:
1. Uly formatly giňişlikde kebşirlemek üçin amatly robot hereketini ulanmak, alty okly baglanyşyk bolup biler.
2. Islendik giňişlikde kebşirläp, kosmosdaky islendik traýektoriýanyň awtomatiki kebşirlemegine hakykatdanam göz ýetirip bilersiňiz.
3. Reokary gaýtalanma takyklygy, kebşirlemäni ýalňyşsyz birnäçe gezek gaýtalap biler, kebşäniň hili has durnukly.
4. El bilen işlemegiň ýerini tutup biler we çylşyrymly we howply meýdanlary lazer bilen kebşirläp biler.
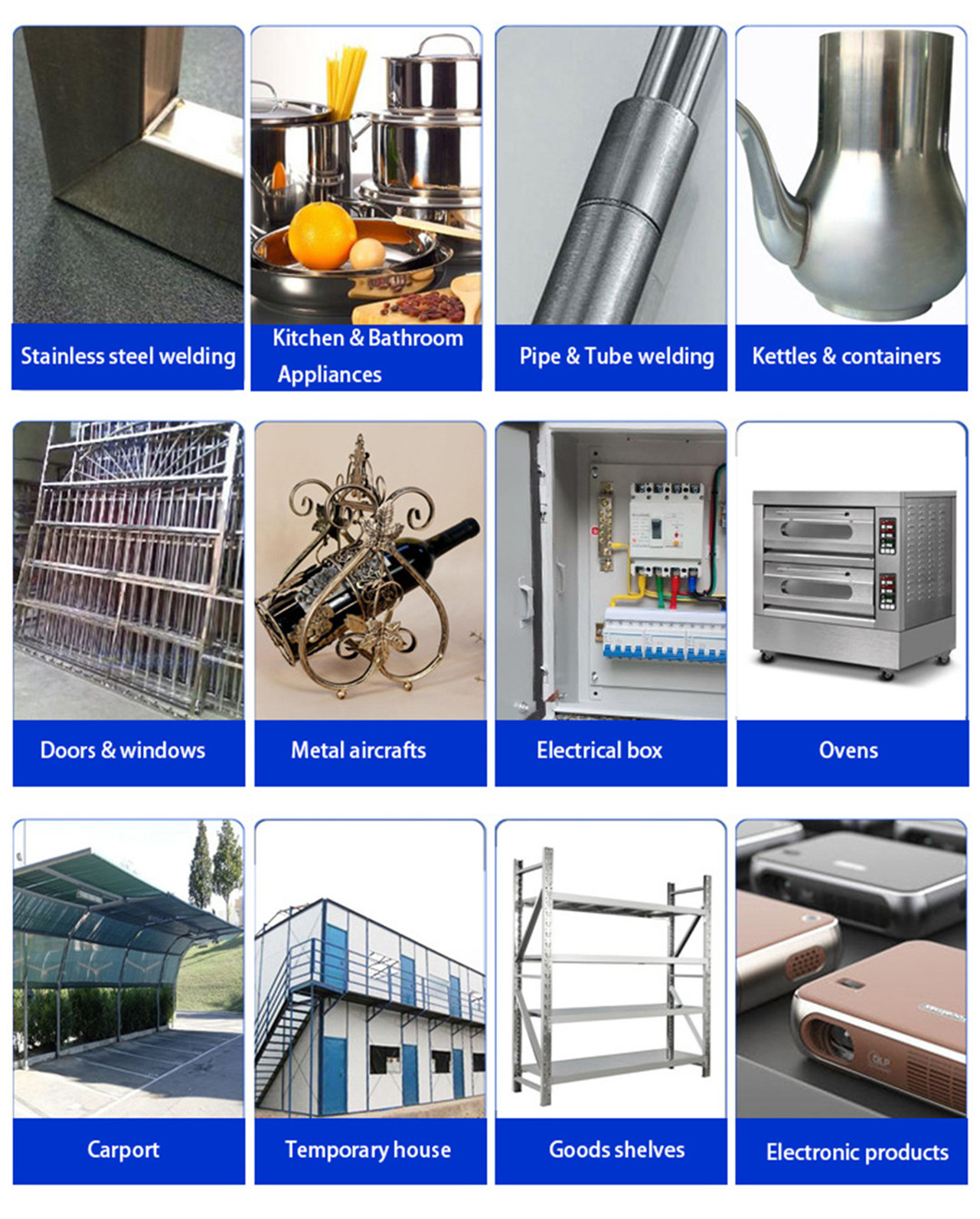
Arza ýerleri:
Awtoulag korpusy, awtoulag polat plastinka, debriya plate plastinka, kyn we çylşyrymly kebşirleýiş meýdanlary, mikroelektron bölekleri, takyk bölekler, ýokary derejeli sanly komponentler, süýüm optiki birikdirijiler, lukmançylyk enjamlary, uly galyp kebşirlemek, sanjym galyplary we beýleki kebşirlemek.
Hünärment çözgüdi
Dolandyryş pedalynda jemlenen sim iýmitlendiriji we kebşirleýiş
0.08mm Robot ýerleşişiniň takyklygy
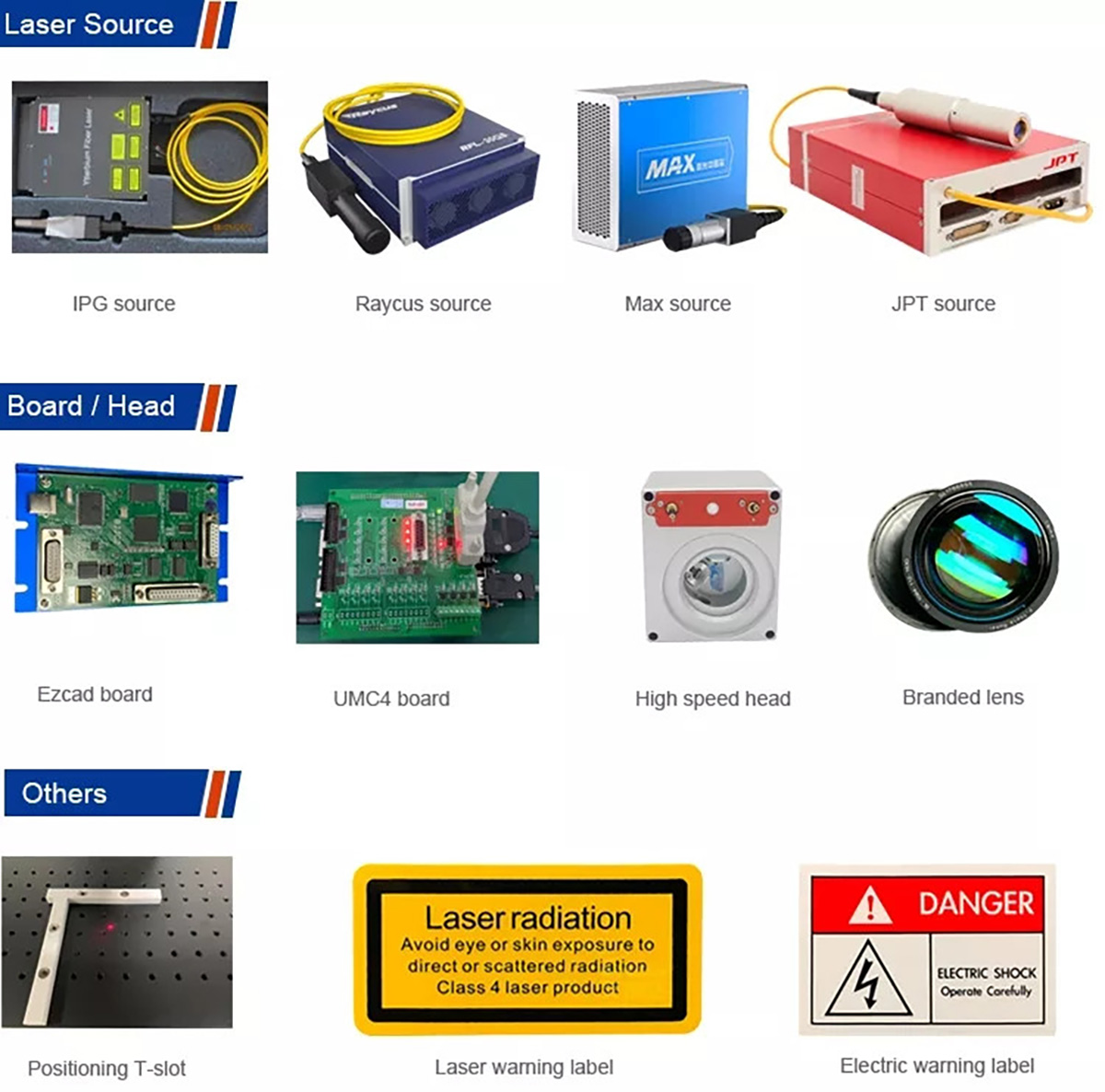
Raycus Max JPT IPG lazer çeşmesi goşmaça
Bütin ulgamy özleşdirmek
| Haryt ady | Robot awtomatiki lazer kebşirleýji maşynMLA-W-A01 |
| Tolkun uzynlygy | 1070 +/- 10 nm |
| Lazer güýji | 1000W 1500W 2000W 3000W |
| Kuwwaty sazlamak | 10-100% |
| Süýümiň uzynlygy | Standart 10m ýa-da kesgitläň |
| Iş usullary | CW / impuls |
| Tizlik aralygy | 0-120 mm |
| Kebşirlemek | 0,5-6 mm |
| Kebşirleýiş boşlugy talaby | <1 mm |
| Modulýasiýa ýygylygy | 20 KHZ |
| Wagty açyň / öçüriň | 20 Biz |
| Iş temperaturasy | 15-35 ℃ |
| Elektrik üpjünçiligi | 220V / 50HZ / 30A |
| Sowuklama usullary | Gurlan suw |
| Maşynyň ululygy | 990 * 540 * 1030 mm |





Işlemek aňsat
Süýümli lazer bilen kebşirleme ussatlygy görkezmesi bilen aňsat hyzmatdaşlyk etmek üçin kontrolleýjini dostluk bilen ulanyň
BOLAN GÖRNÜŞ
Dolandyryş kabinetiniň integrasiýasy, sim iýmitlendiriş funksiýasyna gözegçilik etmekdir. Lazer güýji ýokarlanyp, ýanmagynyň öňüni almak üçin haýal düşüp biler. Haýal ýokarlanmagy we ýykylmagy inçe plastinka kebşirlemek üçin has amatlydyr. Manipulýator gutaransoň, adatça tabakdan kebşirlemek has aňsat.
LASE INTERGRATUION
Lazer ulgamynda kebşirleýiş parametrlerini sazlamakdan başga-da. Şeýle hem, her ulgamyň ýagdaý görkezijisiniň çyrasy, elektrik suwunyň üýtgemegi we obýekti goramak üçin awtomatiki ýatlatma funksiýalary bar.
Başlyk söhbetdeşlik
Toplumlaýyn kebşirleýiş kellesi, kellä CCD, sazlap boljak güýç, awtomatik fokus, amatly iş.
Işlemek aňsat
Okatýan maýatnik düwmeleri ýönekeý we düşünmek aňsat, öwretmek programmirlemesini çalt öwrenip we ulanyp bolýar. Amal nädogry bolsa, enjam zaýalanmak howpundan gaça durmak üçin enjam awtomatiki usulda saklanýar.
TERJIME EDIP BOLUN
Programmirlenensoň, ony hemişe ulanyp bolýar. “MavenLaser Robot Arm” ýokary takyklyk we ýokary tizlik bilen 24 sagat üznüksiz işlemegi goldaýar. Doly awtomatlaşdyrylan amal, robot günde 2-3-den gowrak adamyň iş ýüküni tamamlap biler.
Iň az çykdajy
Bir gezeklik maýa goýum, uzak möhletli peýdalar. “MavenLaser” robotynyň hyzmat möhleti 80 000 sagat, bu 9 ýyldan gowrak 24 sagat üznüksiz işe deňdir. Zähmet çykdajylaryny we işgärleri dolandyrmak çykdajylaryny ep-esli tygşytlaýar we adam toplamakda kynçylyk ýaly meseleleri çözýär.
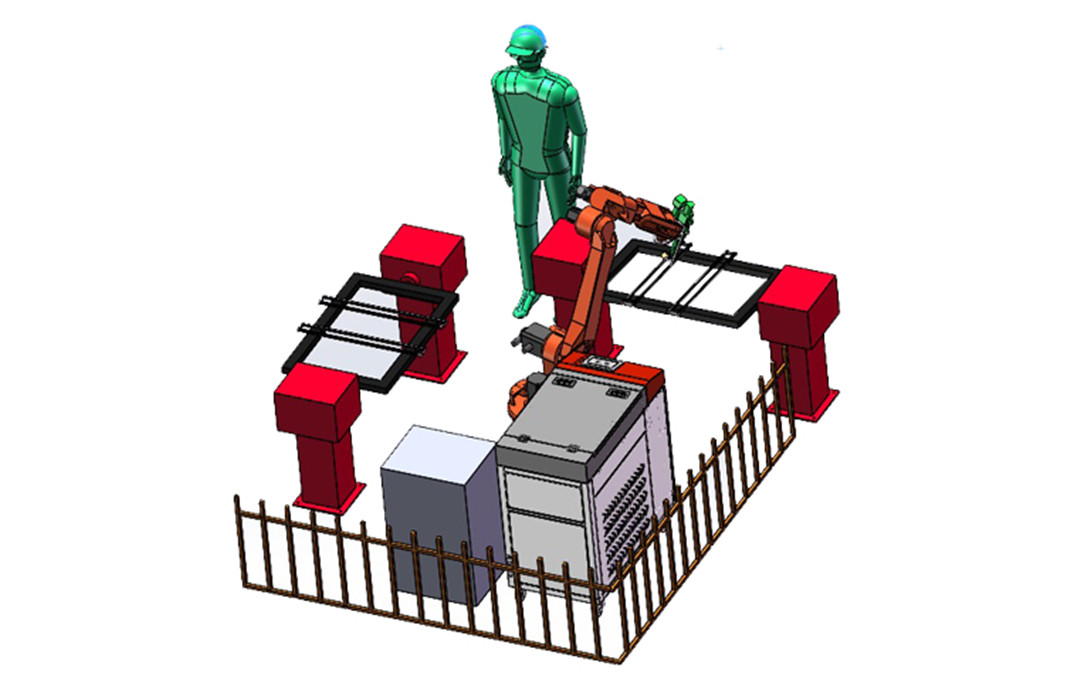
HOWPSUZ we Ygtybarly
“MavenLaser” robot goly fotoelektrik howpsuzlygyny goramak çäreleri bilen enjamlaşdyrylandyr. Daşary ýurt obýektleri iş meýdanyna girenlerinde, işçide tötänleýin bolmazlyk üçin awtomatiki duýduryş berip, işini togtadyp biler.
HOWPSUZ energiýa we söz
“MavenLaser” awtomatlaşdyryş enjamlarynyň çyzgysy ýönekeý we tertipli kiçijik aýak yzy, ses ýok, ýeňil we güýçli robot goly, az energiýa sarp etmek, energiýa tygşytlamak we daşky gurşawy goramak.
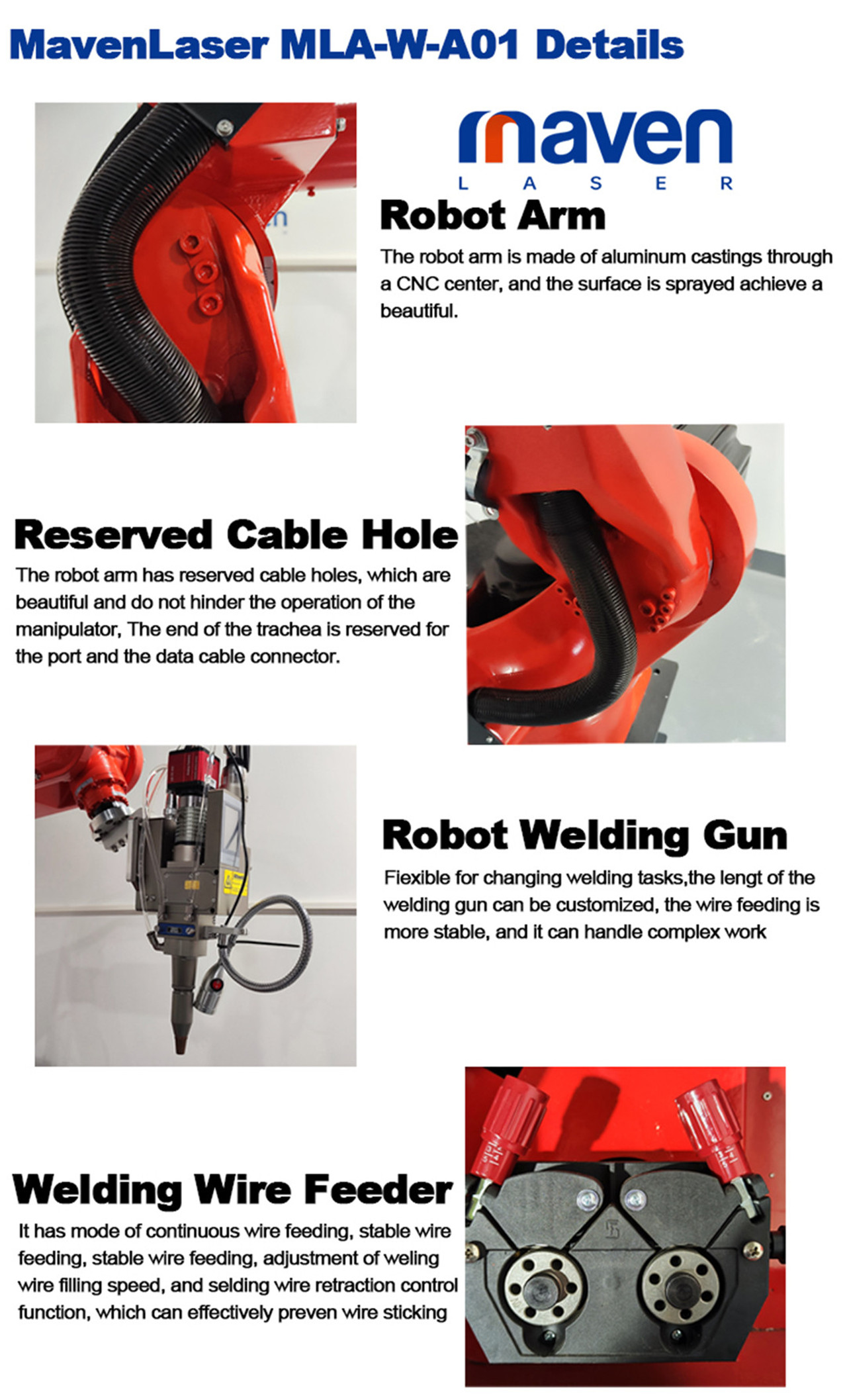
Robot Arm
Robot goly CNC merkeziniň üsti bilen alýuminiý guýmalardan ýasalyp, owadanlyga ýetmek üçin pürküldi.
Goragly kabel deşik
Robot goly, owadan we nit manipulýatoryň işlemegine päsgel berýän kabel deşiklerini saklady, trahaýanyň ujy port we maglumat kabel birleşdirijisi üçin saklanýar.
Robot kebşirleýji ýarag
Kebşirleýiş meselelerini üýtgetmek üçin çeýe, kebşirleýiş ýaragynyň uzynlygy düzülip bilner, sim bilen iýmitlendirmek has durnukly we çylşyrymly işleri ýerine ýetirip biler.
Kebşirleýji sim iýmitlendiriji
Üznüksiz sim bilen iýmitlendirmek, durnukly sim bilen iýmitlendirmek, simleri durnukly iýmitlendirmek, guýma simleri doldurmagyň tizligini sazlamak we simleriň ýapylmagynyň öňüni alyp bilýän simleri yza çekmek dolandyryş funksiýasy bar.
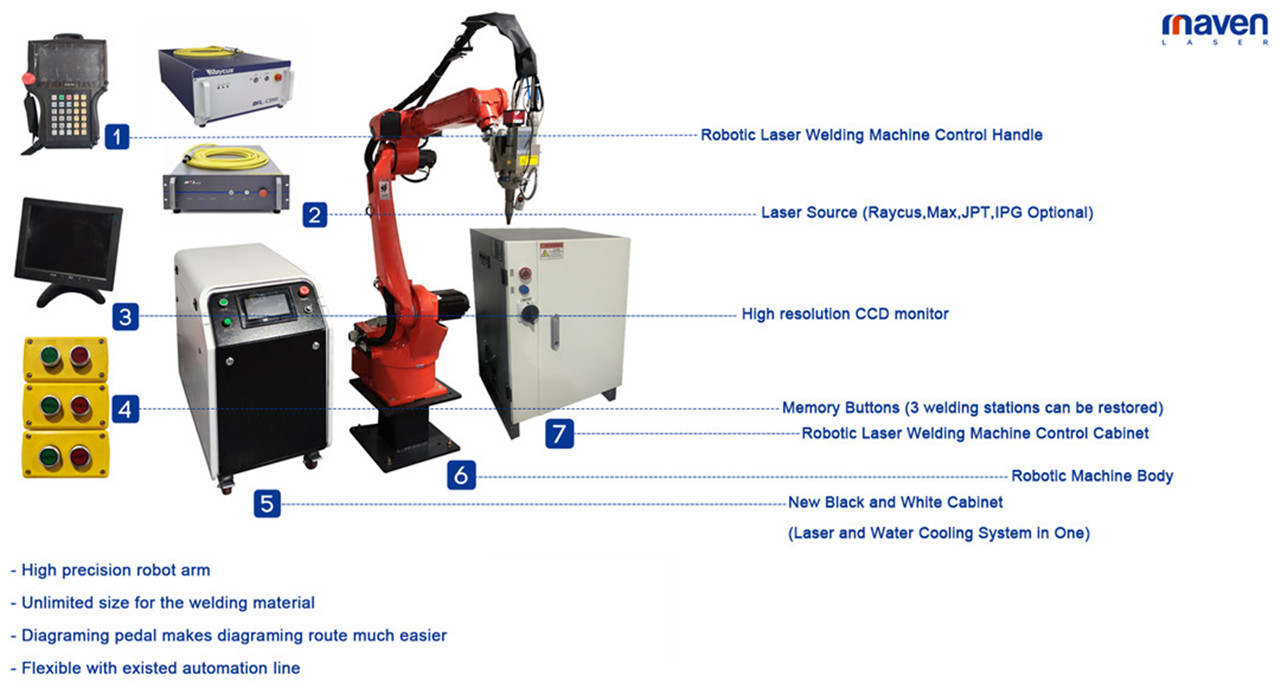
● Lazer çeşmesi (Raycus, Max, JPT, IPG islege bagly)
● resolutionokary çözgütli KCD monitory
● oryat düwmeleri (3 kebşirleýiş stansiýasy dikeldilip bilner)
● Täze gara we ak şkaf (birinde lazer we suw sowadyş ulgamy)
● Robot maşynynyň bedeni
● Robotly lazer kebşirleýji maşyn dolandyryş kabineti
● precokary takyk robot goly
The Kebşirleýiş materialy üçin çäksiz ululyk
● Diagramma pedaly diagramma ýoluny has aňsatlaşdyrýar
Exist Bar bolan awtomatlaşdyryş liniýasy bilen çeýe
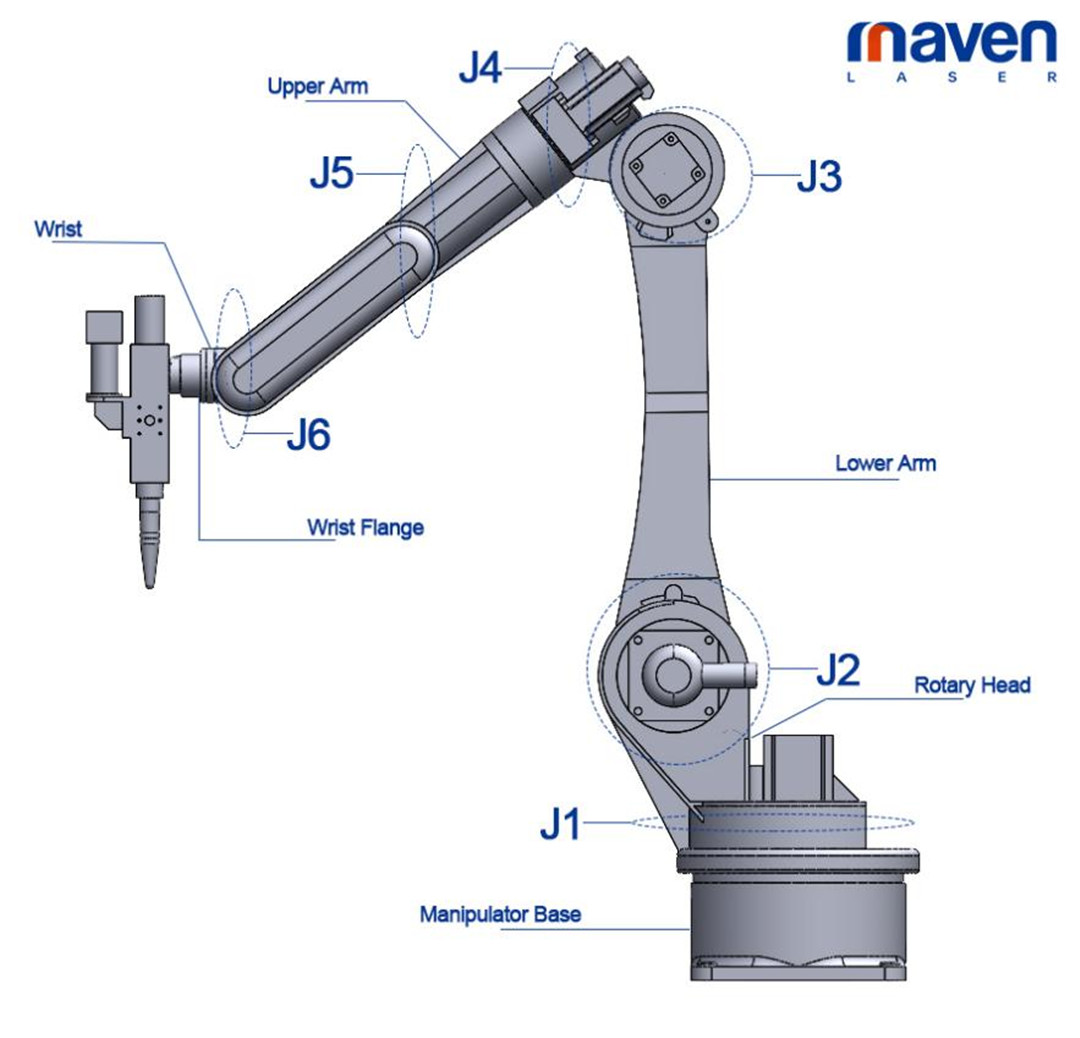
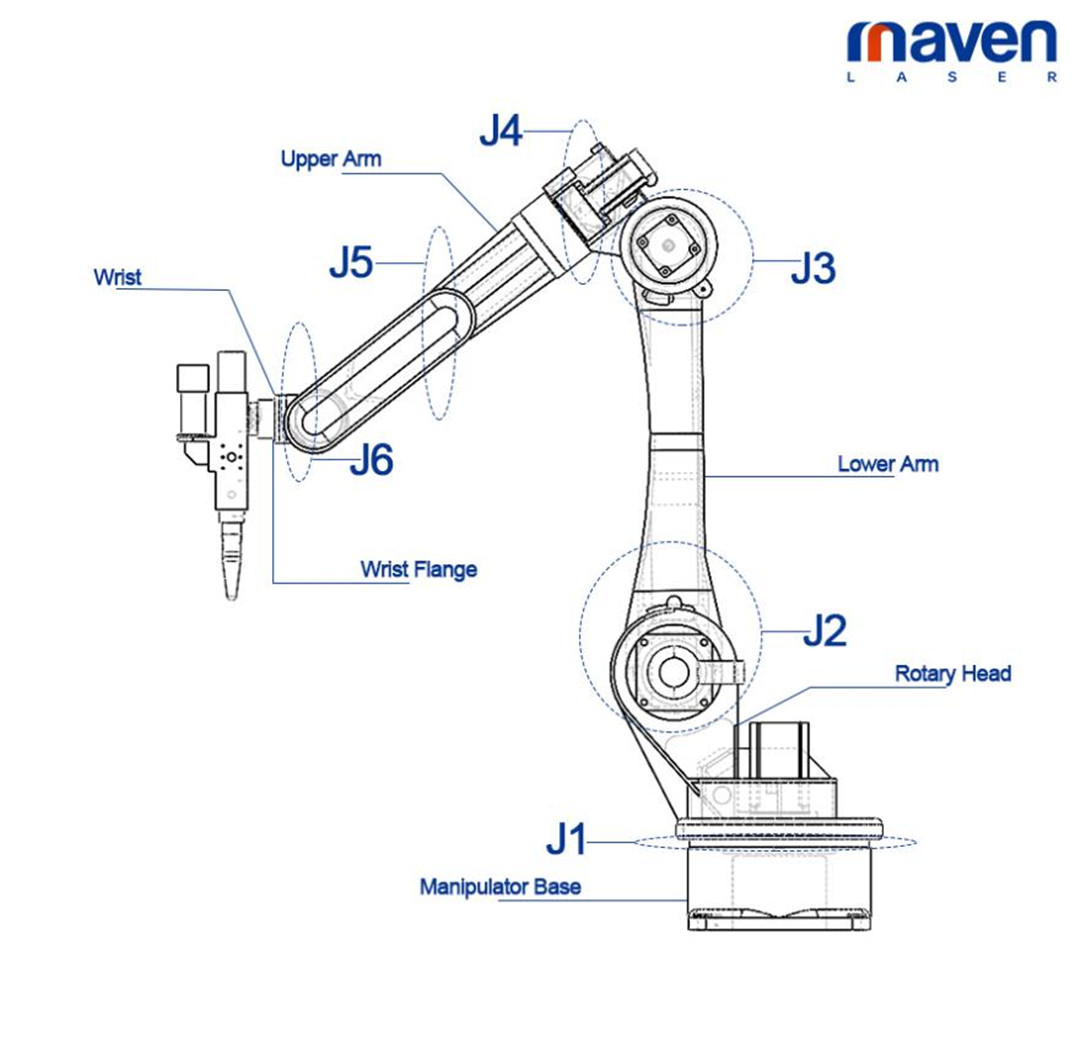
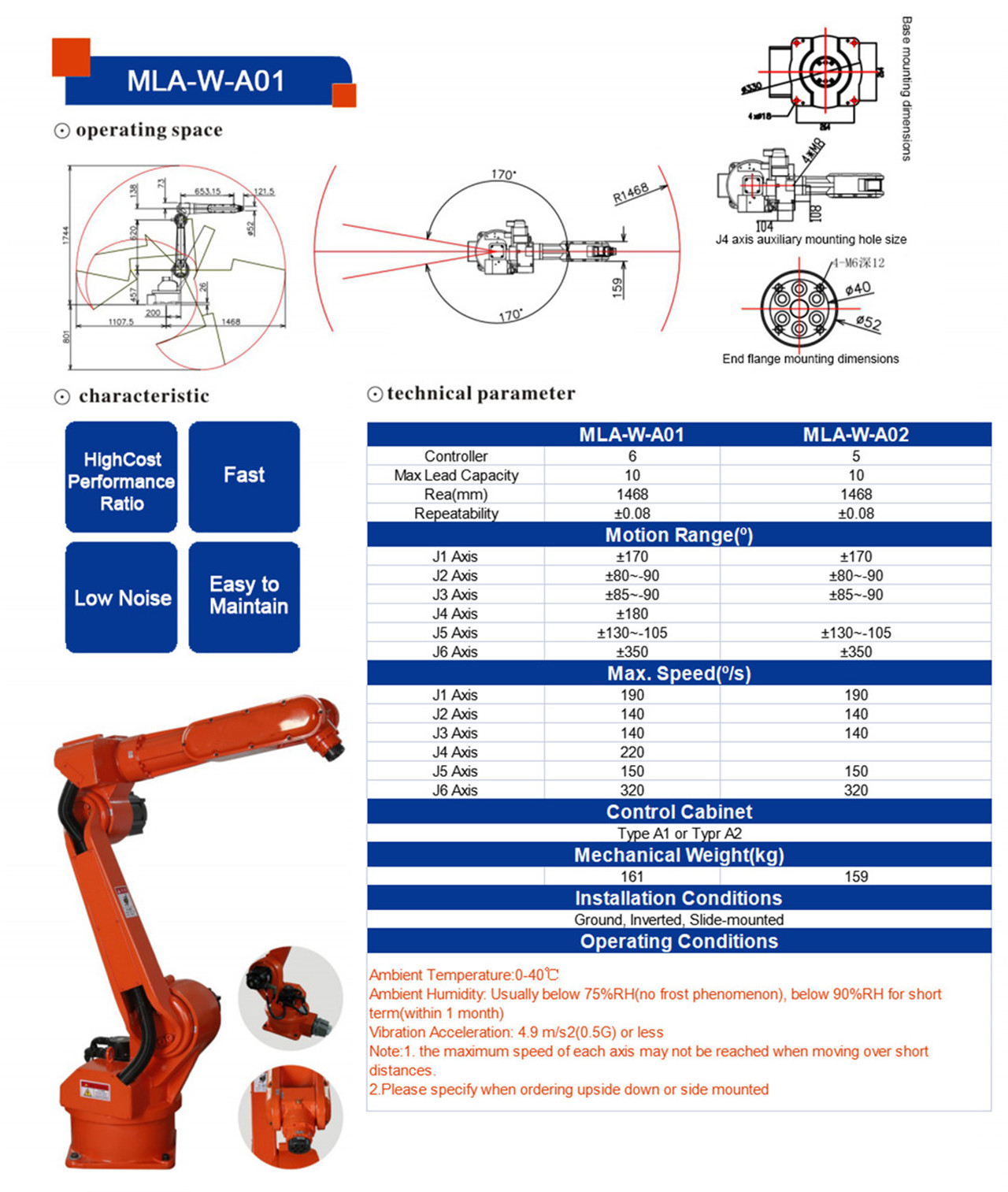
| MLA-W-A01 | MLA-WA02 | |
| Dolandyryjy | 6 | 5 |
| Iň ýokary gurşun ukyby | 10 | 10 |
| Rea (mm) | 1468 | 1468 |
| Gaýtalama | ± 0.08 | ± 0.08 |
| Hereket aralygy (°) | ||
| J1 Ok | ± 170 | ± 170 |
| J2 ok | ± 80 ~ -90 | ± 80 ~ -90 |
| J3 ok | ± 85 ~ -90 | ± 85 ~ -90 |
| J4 ok | ± 180 |
|
| J5 ok | ± 130 ~ -105 | ± 130 ~ -105 |
| J6 ok | ± 350 | ± 350 |
| Maks. Tizlik (° / s) | ||
| J1 Ok | 190 | 190 |
| J2 ok | 140 | 140 |
| J3 ok | 140 | 140 |
| J4 ok | 220 |
|
| J5 ok | 150 | 150 |
| J6 ok | 320 | 320 |
| Dolandyryş kabineti | ||
| A1 ýazyň ýa-da A2 ýazyň | ||
| Mehaniki agram (kg) | ||
|
| 161 | 159 |
| Gurnama şertleri | ||
| Ounder, tersine, slaýd bilen gurlan | ||
| Iş şertleri | ||
Daşky gurşawyň temperaturasy: 0-40 ℃
Daşky gurşawyň çyglylygy: Adatça 75% RH-den (aýaz hadysasy ýok), gysga möhletli 90% RH-den pes (1 aýyň içinde)
Wibrasiýa tizlenmesi :: 4,9 m / s2 (0,5G) ýa-da ondanam pes
Bellik: 1. her okuň iň ýokary tizligi gysga aralyklara geçende ýetip bilmez.
2. Tersine ýa-da gurnalan zakaz edende görkeziň
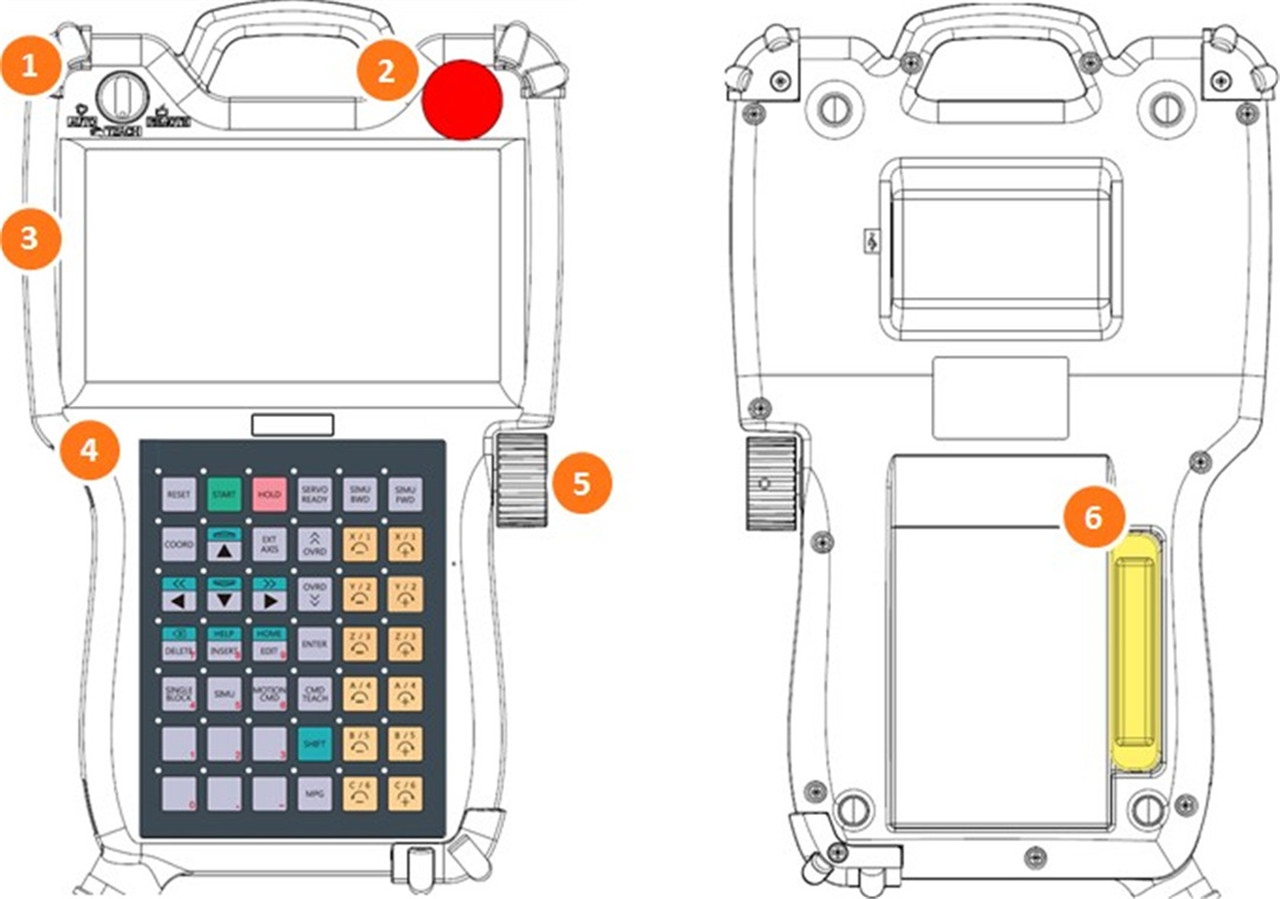
1. Reodeim kommutatory
2. Gyssagly duralga
3. Ekrany görkeziň
4. Fiziki açarlar
5. MPG (Manuel impuls generatory)
6. Enjamy işletmek